Symposium on Intellectual Property and Digital Production
1st July 2005, L Shed, Industrial Museum, Bristol Harbourside
Issues around intellectual property are a key concern for digital artists and designers, revealing a range of tensions between the idealism of work entering the public domain and the pragmatics of making a living. On the one hand, there is the principle that creativity and innovation thrives from the sharing of ideas and material in the ‘commons’ and on the other, that laws are necessary to protect individual and collective interests. This symposium will feature new and provocative ideas that challenge existing structures and practices for those working at the intersections of commerce, research and independent production.
The fonts were developed by students and staff from Looe Community School, who have been assessed as being dyslexic or shows dyslexic traits. The fonts were developed as part of the dyslexier.org project by Looe Community School in conjunction with the IBeam project, created by Plymouth Arts Centre and the Institute of Digital Art and Technology. The students also developed the www.dyslexier.org website to reveal their experiences of being Dyslexic.
Further Font editions include:
IBeam Dancers Font:
Title: CandoCoConcept: Sue Smith / Designer: Chris Speed
Title: Ransom Concept: Lone Twin / Designer: Matt Bilson, Richard Boyd, Ian Hutchison
Title: Attik: Concept: Sarah Cobley, Lois Taylor / Artist: Sam Spake / Designer: Richard Boyd
(26/05/2005). IBeam – Dyslexics Edition is launched on Monday 6th June 2005 3.30pm at the bus stop opposite the Police Station in Looe town centre. Eight posters made using IBeam – Dyslexics Edition fonts are being exhibited in public spaces across Cornwall and Plymouth. Each poster features a typeface that can be read better than conventional typefaces, expresses the designer’s feelings or helps them read and type more effectively. The fonts were developed as part of the dyslexier.org project by Looe Community School in conjunction with the IBeam project, created by Plymouth Arts Centre and the Institute of Digital Art & Technology. IBeam is an ongoing research programme into creative processes using font design. www.dyslexier.org is a website made for dyslexics by dyslexics. IBeam – Dyslexics Edition was supported by Creative Partnerships, Proof Print Arts and Artytechs. http://www.i-dat.org/projects/ibeam
(24/04/2005). i-DAT / Creative Partnerships. Studentship £12,000 + Fees – £3,010: TOTAL £15,010 pa. Applications are invited for a three-year Research Associateship (with one year’s guaranteed funding with the possibility of extending for a further two years) based in i-DAT. The research context provided by the ‘Infinite Infants’ project explores the pedagogic opportunities provided by telematic/networked learning and teaching environments/architectures at reception level. These networked environments will be developed in collaboration with Creative Partnerships, Hyde Park Infants, Langley Community Infants and Woodford Infants School. The research post will be required to develop tools and systems that enhance the learning environment and extend the technological systems developed through the collaboration.
The research context provided by the ‘Infinite Infants’ project explores the pedagogic opportunities provided by telematic/networked learning and teaching environments/architectures at reception level. These networked environments will be developed in collaboration with Creative Partnerships, Hyde Park Infants, Langley Community Infants and Woodford Infants School. The project has funding for Research Associateship to develop tools and systems that enhance the learning environment and extend the technological systems developed through the collaboration.
2005.
Infinite Infants (the original proposal):
[Designing Telematic Play Spaces for Children]
The Project:
Infinite Infants is a trans-disciplinary research project that will develop concepts of ‘play’, ‘creativity’, ‘imagination’, ‘communication’ and ‘self esteem’, and is informed by the theory and practice of digital art, telematics, architecture and virtuality; drawn together through the pedagogical context provided by the collaborating primary schools (Langley Infants, Woodford Infants and Hyde Park Infants, all based in Plymouth). Infinite Infants is a practice based research project exploring the potential for shared, sustainable, virtual environments for children (Foundation stage and Key Stage 1 (ages 4 – 7) and nursery aged children). The research is an enquiry into the potential for situated and collaborative learning via telematic narrative spaces, by exploiting the qualities that digital media affords, such as non-linearity, telepresence, interactive and dynamic environments. The Infinite Infants system will consist of the following functionality: Collaborative play and shared narrative space; Communication tools; Digital Media Creation; Content Management.
Research Objectives:
The principal research objectives for the Infinite Infants project are:
To identify and expand user centred design methodologies and techniques.
To identify suitable medium for mediated communication.
To extract conceptual and inspirational models for virtual architectures.
To determine suitable content management system for both teaching staff and early learners.
To identify the pedagogical benefits afforded by telematic/networked environments/architecture. (f) To explore creative strategies for developing digital media assets and support for users.
Research Methods:
The infinite Infants project utilises a trans-disciplinary approach to the research, design and development of telematic narrative space. The initial research and design philosophy employs a range of approaches from eliciting target users current practice and understanding, to the professional creation of arts and narratives, to inform the interface and structure of the system.
The project design process draws on interdisciplinary methodologies, including HCI, educational research and art and design practice. The project is informed by theories of social constructivism and experiential learning to underpin the pedagogical approach, whilst also utilising teacher’s craft knowledge. The research project includes a range of comprehensive methods to design, develop and evaluate the system, and the creative opportunities it facilitates, including: Practice based workshops, Expert Observation, Peer Evaluation, Interviews, Rapid prototyping (software and hardware).
Please join us with the Vice-Chancellor of the University for a breakfast preview at 10am, on Monday 11th October 2004. Making a Difference at the University of Plymouth is a project for i-DAT by Lucy Kimbell. It uses Arch-OS, an innovative digital system embedded in the architecture of the Portland Square building, enabling passers-by to express the corporate mantra of our times. On pressing a special button, the phrase is broadcast over the entire building, beginning with the first clear iteration of sound but increasingly becoming layered and invasive. The wish to make a difference is also automatically sent as an email to the Vice-Chancellor of the University to register this fact. Data is collected and made public but to questionable effect.
Higher education has changed rapidly over recent years, reflecting the general tendency of increased corporatisation of culture at large. Management cultures insist on personal responsibility where the individual employee is supposed to align themselves with the organisation’s brand values. The phrase, ‘I want to make a difference’, reveals something of the tendency towards increased individualisation and a break with previous collective ways of engendering change. Does this demonstrate the view that large corporate and hierarchical institutions are ineffectual, that local and more complex models are at work in the forces of change? Who holds responsibility in seeking positive improvement in the workplace and in terms of the service on offer? Will the number of people pressing the ‘I want to make a difference’ button reveal a true willingness or an empty gesture towards change? The shift from the individual sound to a chorus by the end of the project presents itself as an allegory in this respect.
Lucy Kimbell is AHRB Creative and Performing Arts Fellow at the Ruskin School of Drawing and Fine Art, University of Oxford.
Making a Difference at the University of Plymouth is a project by Lucy Kimbell, with special thanks to George Grinsted for software development.
Arch-OS was decommissioned in 2017 and although the infrastructure still exists (including the 3D speaker system and audio servers) the Arch-OS core server is no longer functioning.
‘Global Feed’ builds upon decades of previous work by Peter Fend exploring aspects of our relationship to the environment, through his work as part of Ocean Earth Development Corporation, and his ongoing collaborations with artists, architects, engineers and scientists. Ocean Earth was conceived as an instrument for implementing the goals of the environmental art movement, directly building upon the ideas of artists such as Joseph Beuys, Robert Smithson and Gordon Matta-Clark.
Through inter-disciplinary collaborations and by connecting ecological imperatives with experimental new technologies, Fend asks ‘How far can art go?’ in drawing attention to a belief that artistic research can generate productive dialogue about global ecological problems and that it can be used to develop effective solutions. In this spirit, Global Feed aims to organise the display of processed satellite data for the public to see for itself. Peter Fend undertook a research fellowship at i-DAT from autumn 2003 until summer 2004, supported by the AHRB and Arts Council of England.
S.T.I. is funded by the SciArt programme (supported by the ACE, the British Council, the Calouste Gulbenkian Foundation, SAC, the Wellcome Trust and NESTA)., and turns the technologies that look to deep space for Alien Intelligence back onto Planet Earth in a quest for ‘evidence’ of Terrestrial Intelligence. Looking at Earth from space the project will develop processing techniques using autonomous computer software agents. S.T.I. moves beyond irony by engaging with our understanding of the ‘real world’ through our senses, whether real or artificially enhanced. Will these autonomous systems ‘know’ the ‘truth’ when they ‘see’ it? The S.T.I. Consortium: STAR, Dr Guido Bugmann, Dr Angelo Cangelosi, Laurent Mignonneau, Christa Sommerer, Dr Nick Veck.
The STI Server is no longer alive but video grabs can be found here:
T H E S . T . I . P R O J E C T : T H E S E A R C H F O R T E R R E S T R I A L I N T E L L I G E N C E INTRODUCTION: PROJECT: CONSORTIUM: PATHWAY: OUTPUT: COPYRIGHT: INTRODUCTION:
The Search For Terrestrial Intelligence is funded through an R&D grant awarded to the Consortium by the Wellcome Trust SciArt competition http://www.wellcome.ac.uk/sciart. The sciart competition aims to encourage scientists and artists to work together creatively. Awards are offered to partnerships of scientists and artists working on projects that capture the public’s imagination with some aspect of biology, medicine or health. The competition has been run twice, in 1997 and 1998.
S.T.I. turns the technologies that look to deep space for Alien Intelligence back onto Planet Earth in a quest for ‘evidence’ of Terrestrial Intelligence. Using satellite imaging and remote sensing techniques S.T.I. will scour the Planet Earth using similar processes employed by SETI (the Search for Extra Terrestrial Intelligence). Looking at Earth from space the project will develop processing techniques using autonomous computer software agents. In their search for evidence of intelligence the agents will generate new images, animations and audio (which may produce more questions than answers) which will be publicly accessible on this website.
From the original Wellcome ArtSci Pitch: PROJECT:
S.T.I. establishes a common ground for the consortium by sharing the collective knowledge of remote sensing, imaging technologies, autonomous agents (AI and Neural Networks), and On-Line interaction. The Project fuses this knowledge into a challenging exploration of planetary data analysis, through a process of experimental prototyping of a number of autonomous data analysis agents that will reside on this website.
Vision dominates our culture and lies at the heart of scientific and artistic endeavour for truth and knowledge. Increasingly the dominance of the human eye is being challenged by a new generation of technologies that do our seeing for us. These technologies raise critical questions about the nature of the truth and knowledge they illicit, and the way in which we interpret them. In turn these questions raise issues about the way we, through science and art, have always ‘known’ the world. The S.T.I. Project goes beyond the irony of the search for terrestrial intelligence on Earth by engaging with our understanding of the ‘real world’ through our senses, whether real or artificially enhanced. Will these autonomous systems ‘know’ the ‘truth’ when they ‘see’ it?
The S.T.I. Project reveals the processes used by science to ‘see’ the ‘real world’, making transparent the scientific method itself. In so doing S.T.I. generates ‘artefacts’ that question the way we perceive our environment and ourselves. This process of imaging says as much about the observer, the nature of the experiment and the technology as it does about the actual data gathered. This link between knowledge and vision, knowing and seeing, questions the way art and science utilise the visual dialectics of truth and deception.
The S.T.I. Project engages in critical issues surrounding the shift from the hegemony of the eye to the reliance on autonomous systems to do our seeing for us. This shift has an equal impact on scientific processes and creative endeavour. By turning away from ‘outer space’ to an examination of ‘our space’ the project also engages public interest, as expressed in the popular imagination through science fiction (X files, etc), in the alien within our midst. Do we recognise ourselves when seen through our artificial eyes.
For example: ‘Face on Mars’. The blurred and faded images sent back by the 1976 Viking Orbiter reveal little to the naked eye, until they are digitally processed. The processing slowly reveals a skull like face that stares blankly from the surface of mars. The technology strips away the grain and fuzz and re-visions. The ‘face’ becomes gradually un-obscured, progressively un-veiled, with features suggestive of eyes, a ridge-like nose, and a mouth, its ‘truth’ emerging through the technology. Maybe the processing techniques employed allow us to see more clearly the images we nurture inside our heads. Maybe they bring into sharp focus the things we want to see.
CONSORTIUM:
The S.T.I. Project Consortium brings together artists, scientists and technologists from four research groups (STAR, CNAS, ATR, NRSC) based in three organisations, the University of Plymouth, ATR Media Integration & Communications, Research Laboratories, and the National Remote Sensing Centre (NRSC) Limited. The S.T.I. Project involves a Development Committee, which consists of eight individuals, short C.V.s are included in the supporting information section of this application. They are:
PATHWAY:
The research and development of the S.T.I. project is broken down into three stages. The nature of the project requires an exploratory and prototyping method of systems design. Although there is no recognised ‘best practice’ critical pathway, STAR has identified a system, which is based on EMG’s production pathway. Many of these activities will run concurrently.
R&D Pathway: May 2000-March 2001: Phase 1: Concept and Research. This will consist of a design process, which identifies/assesses the nature of: the information currently available from remote sensing technologies; processing techniques currently employed for the analysis of remote sensing data; rules and processes that can be employed to ‘train’ the autonomous systems; design guidelines for the production of the autonomous analysis systems. Much of this knowledge exists within the S.T.I. consortium, its dissemination between the committee will take place through meeting (IRL and On-Line). Phase 2: Prototyping. This will require the consortium and the production assistant to generate autonomous systems. Phase 3: Website design and production.
The completion of the R&D stage will be formalised by a S.T.I. Project Seminar/Launch, which will provide a public presentation of the projects findings and activities.
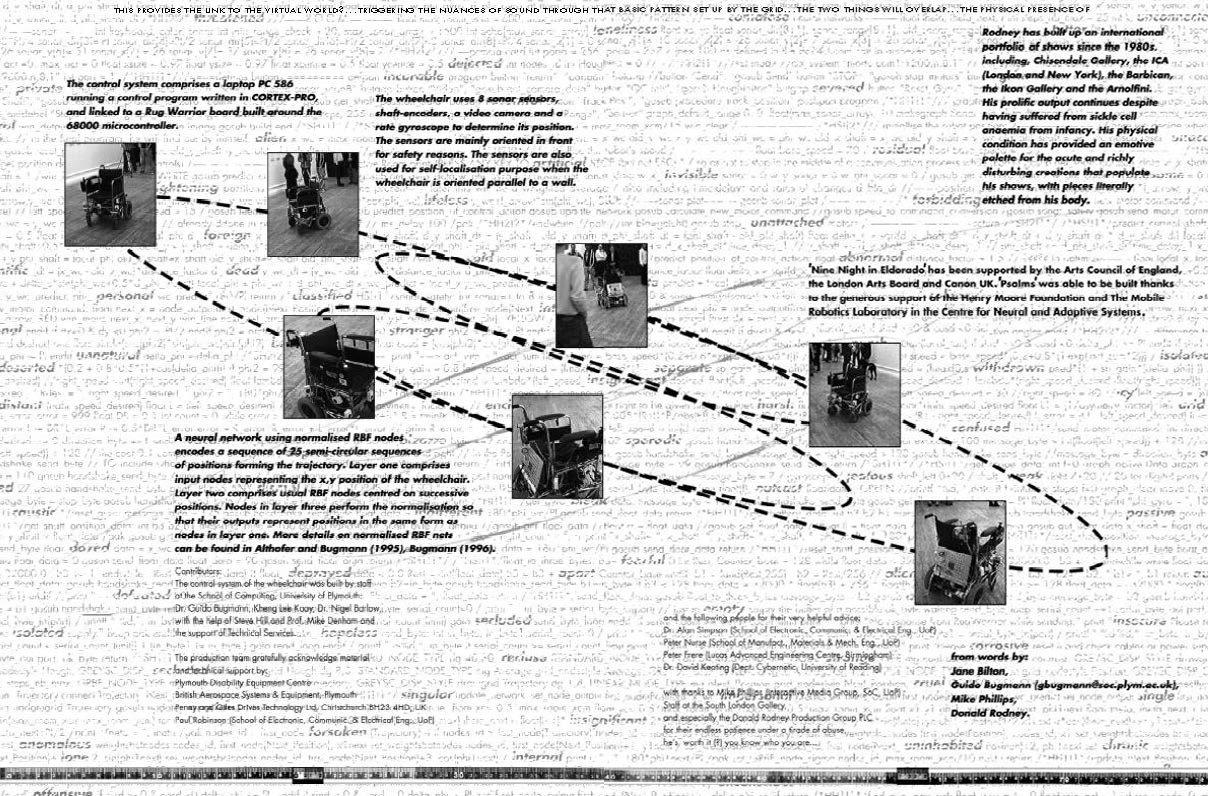
“…Our fear of automata is again harnessed in Psalms, as the empty wheelchair courses through its various trajectories on a sad and lonely journey of life, a journey to nowhere. Its movements repeat like an ever recurring memory, a memory of another life and another journey, that of Donald Rodney’s father…”
(Exhibition brochure, Jane Bilton.)
Psalms. On show at Plymouth Council House for the Atlantic Project 28 September – 21 October 2018.
Psalms in action at the opening of “Nine Night in Eldorado” at the South London Gallery 1997.
Niet Normaal: Beurs van Berlage, Amsterdam, 16 December 2009 to 8 March 2010:
[su_youtube url=”https://www.youtube.com/watch?v=Fe029H2Y8tc” width=”1600″ height=”1600″]
‘The political significance of Rodney’s work should not be underestimated, nor his legacy which continues to inspire younger artists.’ (Keith Piper, Co-curator).





























































You must be logged in to post a comment.