

Psalms is the Autonomous Wheelchair constructed by Guido Bugmann for Donald Rodney’s “Nine Night in Eldorado” at the South London Gallery, 1997.
“…Our fear of automata is again harnessed in Psalms, as the empty wheelchair courses through its various trajectories on a sad and lonely journey of life, a journey to nowhere. Its movements repeat like an ever recurring memory, a memory of another life and another journey, that of Donald Rodney’s father…”
(Exhibition brochure, Jane Bilton.)
Psalms. On show at Plymouth Council House for the Atlantic Project 28 September – 21 October 2018.



Psalms in action at the opening of “Nine Night in Eldorado” at the South London Gallery 1997.
Short article published in Mediaspace: http://www.mike-phillips.net/blog/wp-content/uploads/2014/01/mediaspace4.pdf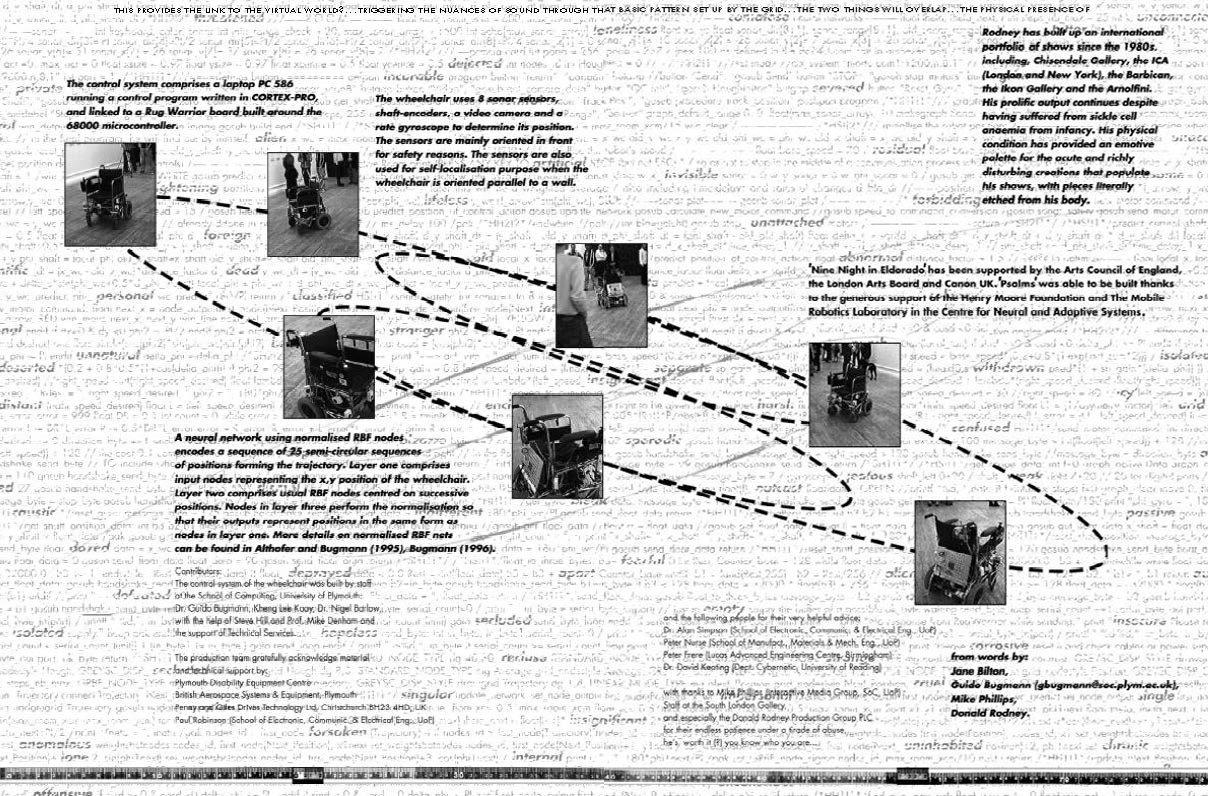
 The work has also been exhibited at:
The work has also been exhibited at:
- Reimaging Donald Rodney, Vivid Projects, Birmingham 8 Ocrober – 5 November, 2016. http://www.vividprojects.org.uk/programme/reimaging-donald-rodney/
- Superhuman. Exhibition at the Wellcome Trust, 19 July 2012 – 16 October 2012. https://wellcomecollection.org/whats-on/exhibitions/superhuman
- Niet Normaal: Beurs van Berlage, Amsterdam, 16 December 2009 to 8 March 2010:
[su_youtube url=”https://www.youtube.com/watch?v=Fe029H2Y8tc” width=”1600″ height=”1600″] - Donald Rodney In Retrospect. Institute of International Visual Arts (INIVA), London, 30 Oct – 29 Nov 2008. http://www.iniva.org/exhibitions_projects/2008/in_retrospect
‘The political significance of Rodney’s work should not be underestimated, nor his legacy which continues to inspire younger artists.’ (Keith Piper, Co-curator).
The web page by Dr Guido Bugmann tracks the various installations and technical details for the commision.
http://www.tech.plym.ac.uk/soc/staff/guidbugm/wheelchair/wheelc.htm
(pdf version here).

Reboot 2016.
The wheelchair uses 8 sonar sensors, shaft-encoders, a video camera and a rate gyroscope to determine its position. A neural network using normalised RBF nodes encodes the sequence of 25 semi-circular sequences of positions forming the trajectory. The control system comprises a laptop PC 586 running a control program written in CORTEX-PRO, and linked to a Rug Warrior board built around the 68000 microcontroller.
Original (with some tweaks) Psalms Code (courtesy of Guido Bugmann):
/*HS!!1*/// program WCSHOW8.CTX // version 14 Sept 97, 15 March 98, Feb 2003, Oct 2008 (INIVA gallery London) // version Nov 2009 // version june - july 2012 Wellcome exhibition // wheelchair project 97 // modif of wcshow2.ctx by adding correct // trajectories encoding from wcshow3.ctx //from wcshow6.ctx /*SH1!1*///variables // new. Including room dimensions /*HS!!2*///----------comm variables-------------- int Eureka =104, scope_data = 110, gyro_data = 105, gyro_reset = 125 int reset_shaft_xyphi = 120 int battery_data = 106 int i int ok_byte = 33, ready_byte = 44, sending_byte = 55, command_send = 66 int stop_byte = 77, stop_motors = 99, motor_command = 107 int message_byte, b1, b2, b3 int serial_count, serial_count_limit = 500 // a smaller limit may be better float float_data int left_speed = 1, right_speed = 1 float right_speed_desired = 0 float left_speed_desired = 0 /*HH2!2*///----------position variables-------------- float PI = 4*arctan(1) float phi2, angle1, angle2, delta_phi, angle_difference float x_wc=0, y_wc=0, phi_wc=0 float x_wc_shift=0, y_wc_shift=0, phi_wc_shift=0 float old_x_wc=0, old_y_wc=0, old_phi_wc=0 float d_x_wc_dt, d_y_wc_dt, d_phi_wc_dt float x_wc_predict, y_wc_predict, phi_wc_predict float previous_phi_wc, previous_x_wc, previous_y_wc float x_shaft, y_shaft, phi_shaft float w_x_shaft, w_y_shaft, w_phi_shaft, w0_shaft float d_x_shaft_dt, d_y_shaft_dt, d_phi_shaft_dt float old_x_shaft, old_y_shaft, old_phi_shaft float phi_gyro, w0_gyro, w_phi_gyro, d_phi_gyro_dt float phi_camera, w_phi_camera, d_phi_camera_dt float phi_cam1, phi_cam2 float x_sonar, y_sonar, phi_sonar float w0_sonar, w_x_sonar, w_y_sonar, w_phi_sonar float d_x_sonar_dt, d_y_sonar_dt, d_phi_sonar_dt float last_time_shaft, last_time_motor /*HH2!2*/// ---------wheelchair--------- float delta_r = 56.5 /*HH2!2*///----------R O O M Dimensions at Wellcome trust ------------ float max_room_xcm = 1000 //694 float max_room_ycm = 1100 // 1005 /*HH2!2*///----------trajectory---------------//new int section_list[32] /*HH2!2*///----------neural networks --------------- // new float theta, theta_next, r int steps_nb_max = 16 int k, current_grid int section_size[40] /float section_boost= 150 / old section based /float section_boost= 50 / new node based for trajectory float section_boost= 90 // test using 1. Should be 90 / new node based for field drawing /float section_boost= 0.3 / very new node + sigma based for trajectory float forced_next_state /*HH2!2*///----------speed variables----------// new float section_speed[200] int current_section, temp_left_speed, temp_right_speed /*HH2!2*///-----------sonar -------------- int keyboard, color, sonar, alarm_persistence = 0 float time_since_last_alarm = 0, time_of_last_alarm = 0 int min_range_check = 20, max_sonar_array = 1500 int echo[max_sonar_array] float found_flag, xs, ys float sonar_dir[8+1], sonar_range[8+1], old_sonar_range[8+1], sonar_x[8+1], sonar_y[8+1] int front_obstacle, left_obstacle, right_obstacle sonar_dir[1]=-PI/2 sonar_dir[2]=3*PI/4 sonar_dir[3]=-PI sonar_dir[4]=PI/2 sonar_dir[5]=PI/2 sonar_dir[6]=PI/2 sonar_dir[7]=0 sonar_dir[8]=PI/4 sonar_x[1] = 0 sonar_y[1]= -10 sonar_x[2] = -26 sonar_y[2]= 7 sonar_x[3] = -26 sonar_y[3]= 37 sonar_x[4] = -26 sonar_y[4]= 51 sonar_x[5] = 0 sonar_y[5]= 51 sonar_x[6] = 26 sonar_y[6]= 51 sonar_x[7] = 26 sonar_y[7]= 37 sonar_x[8] = 26 sonar_y[8]= 7 float sonar_d1, sonar_d2, sonar_d3, sonar_d4 /*HH2!2*/// -----pcmcia card-------- //int porta = 256, portb = 257 int porta = 8192, portb = 8193 //int porta = 992, portb = 993 //int porta = 640, portb = 641 / (hex 100 as defined in the dc24cl.com call in autoexec.bat) / (hex 3e0 = 992 dec as defined in the dc24cl.com call in autoexec.bat) // hex 280 = dec 640 /*HH2!2*///---------video------------ float contrast_gain = 5 float av_act =0, max_act = 0, w0_camera float xsize = 0.97 float ysize = 0.97 float xcentre = 0.5 float ycentre = 0.5 int nodes_id, max_search = 50 int Houghinit = 0 /*HH2!1*///--- set serial port mode---- //ctx_system "mode com1:1200,n,8,1" // ctx_system "mode com2:9600,n,8,1" // int port = 2 // ctx_system "mode com1:9600,n,8,1" ctx_system "mode com1:9600,n,8,1,p" int port = 1 //pak /*HH1!1*///====defines buttons ========= defpan progpan button "return", "poppan" butgap //button "Send", "gosub Send" button "STOP", "gosub stop_motors" button "Motors_on", "gosub send_motor_command" butgap //button "Scope", "gosub get_scope_data" button "Sonar", "gosub sonar_scan8" /butgap /button "Video", "gosub get_camera_data" /button "QC init", "gosub Houghinitqc" butgap button "Reset_Gyro", "gosub reset_gyro" button "Gyro", "gosub get_gyro_data" butgap button "Reset Shaft", "gosub reset_shaft_position_to_zero" button "Shaft_pos", "gosub get_shaft_position_data" butgap button "Track Pos.", "gosub procedure_track_position" pushpan progpan /*HH1!1*/// graphs and windows float max_steps = 255 graph_default_gridtype 0 graph_default_axislabel "Steps", "Data" graph_default_range 0, 0, max_steps, 255 makegraph Data graph_default_axislabel "Range", "Sensor" graph_default_range 0, 0, float(max_sonar_array), 10 makegraph Sonar /win_default_range 0,0,1,1 /makewin Image win_default_range -50,-50,50+max_room_xcm,50+max_room_ycm makewin Room //win_plot 0, 0, RED //win_line 1000, 1100, YELLOW /*HH121*/// Build network and define trajectory sections to be used /gosub build / needed only if image is used /gosub build_a_circle /*HS!!2*/// define section list // new - need to reflect in "build trajectory" for i=1 to 31 section_list[i]=-99 next i // actually used sections: section_list[1]=1 section_list[2]=2 section_list[3]=3 section_list[4]=4 section_list[5]=13 section_list[6]=14 section_list[7]=15 section_list[8]=16 // needs to be in ascending order for now. gosub build_trajectories /*HH1!1*/int ON_BRICKS = 0 //if on bricks = 1 -> sonar-based obst. avoid disabled int SIMULATION = 0 // ---> clear and run the program if the values above are changed /*SH1!1*/end /*SS!!1*/ /*HS!!1*/procedure_track_position: // Initial position to set here /*HS!!2*/restart_procedure: w0_shaft = 1 w0_gyro=1 w0_camera = 0 w0_sonar =1 alarm_persistence=0 float l_arrow = max_room_xcm/15 /----------------------------------- /*HH2!2*/// initialise the robot position: /----------------------------------- // here we decide where he starts and where he looks. // in the final program, he will find out by himself. /gosub procedure_self_localisation // x_wc = max_room_xcm/2 x_wc = 700 // For Wellcome Trust y_wc = 0 phi_wc = PI/2 //towards middle of room = north // phi_wc = 0 // towards right. // phi_wc = PI/2 - 0.35 //North, slightly to the East. / to start the sequence: //set_grid_outputs Sequence_State, 1*section_boost set_grid_outputs Sequence_State, 5*section_boost old_x_wc = x_wc old_y_wc = y_wc old_phi_wc = phi_wc old_x_shaft = x_wc old_y_shaft = y_wc old_phi_shaft = phi_wc gosub reset_shaft_position gosub reset_gyro old_x_shaft=x_wc old_y_shaft=y_wc old_phi_shaft=phi_wc if SIMULATION=1 float next_x = x_wc float next_y = y_wc float next_phi = phi_wc endif /----------------------------------- /*HH2!2*/// initialise the robot's speed and speed per section // new /----------------------------------- float base_speed = 20 // 15 //13 //what is the max? // 20 is right for Wellcome left_speed = 1 right_speed = 1 gosub send_motor_command // to preload the capacitor and prevent // a start backwards /test /base_speed = 10 left_speed_desired = 0 right_speed_desired = 0 /---------------------------------------- // start large circles------------- for k = 0 to 12 section_speed[k]=0.8*base_speed //was 0.7 next k for k = 13 to 24 section_speed[k]=0.8*base_speed next k for k = 25 to 48 section_speed[k]=base_speed next k // start inwards spiral------------ for k = 49 to 60 section_speed[k]=0.9*base_speed next k for k = 61 to 70 section_speed[k]=0.8*base_speed next k for k = 71 to 78 section_speed[k]=0.6*base_speed next k for k = 79 to 83 section_speed[k]=0.5*base_speed next k for k = 84 to 87 section_speed[k]=0.4*base_speed next k // start figures of eight------------ for k = 88 to 94 section_speed[k]=0.4*base_speed next k for k = 95 to 156 section_speed[k]=0.5*base_speed next k for k = 157 to 162 section_speed[k]=0.4*base_speed next k // start outward spiral------------- for k = 163 to 166 section_speed[k]=0.4*base_speed next k for k = 167 to 175 section_speed[k]=0.5*base_speed next k for k = 176 to 185 section_speed[k]=0.7*base_speed next k for k = 186 to 199 section_speed[k]=0.8*base_speed next k /--------------------------------------------------------------- /*HH2!2*/// Main control Loop (get position data, plot, compute controls) /--------------------------------------------------------------- win_active Room win_clear print "PRESS ANY KEY TO STOP (but not ESC)." / so as not to stop in the middle of a communication process win_move 0,0 win_line max_room_xcm,0, 4 win_line max_room_xcm, max_room_ycm, 4 win_line 0, max_room_ycm, 4 win_line 0, 0, 4 init_timer last_time_shaft = 0 last_time_motor = 0 /*HH2!2*/while !kbhit() keyboard = port_in(96) / /my_sound 5000,30 if elapsed_time(1) > 100000 init_timer last_time_shaft = 0 last_time_motor = 0 endif /*HH2!2*/ //gosub get_shaft_position_data if SIMULATION=1 x_shaft= x_wc+ 0.3*(next_x-x_wc) y_shaft = y_wc+0.3*(next_y-y_wc) phi_shaft =next_phi// +0.1*(next_phi-phi_wc) else gosub get_shaft_position_data endif w_x_shaft = 0.5 w_y_shaft = 0.5 w_phi_shaft = 0.25 if y_shaft=0 & x_shaft = 0 goto restart_procedure endif /win_line x_shaft, y_shaft, WHITE /*HH2!2*/ gosub predict_current_shaft_position / gosub get_gyro_data / w_phi_gyro = 0.25 / print " Phi G Y R O = ", phi_gyro*180/PI /*HH2!2*/ // gosub get_sonar_data if SIMULATION!=1 gosub get_sonar_data endif /*HH2!2*/ gosub check_sonar_validity phi_sonar = phi_sonar + 0.45*d_phi_shaft_dt / the 0.45 sets the value to that at the time when the RugWarrior / is updated (the same 0.45 is used to bring back to the present the / angles in "check_sonar_validity") /*HH2!2*/// if necessary (robot stuck in a corner), relocalise //if alarm_persistence > 6 // gosub relocalise //endif / gosub get_camera_data / w_phi_camera = 0 x_wc = (w_x_shaft*x_shaft+w_x_sonar*x_sonar)/(w_x_shaft+w_x_sonar) y_wc = (w_y_shaft*y_shaft+w_y_sonar*y_sonar)/(w_y_shaft+w_y_sonar) //print "====++++++ y_wc = ", y_wc, " y_shaft = ", y_shaft /*SH2!2*///print "====++++++ x_wc = ", x_wc, " x_shaft = ", x_shaft /*HS!!2*/// calculate weight-averaged position values angle1=phi_shaft angle2=phi_sonar gosub angle_diff / if abs(angle_difference) > 0.3*PI / w_phi_sonar=0 / endif phi_wc = (phi_shaft*(w_phi_shaft+w_phi_sonar) + w_phi_sonar * angle_difference)/(w_phi_shaft+w_phi_sonar) /----wc positions are estimated at time present--- / later this will be a weighted average / also including time-delays and rates of changes d_bla_dt /*HH2!2*/// reset values in RugWarrior board if w_phi_sonar > 0 | w_x_sonar > 0 | w_y_sonar > 0 angle1=0 angle2=phi_wc gosub angle_diff phi_wc = angle_difference gosub reset_shaft_position /gosub reset_gyro / /my_sound 1000,30 endif /*HH2!2*/ //----------position and sonar plot----------- win_fillellipse x_wc-0.1*l_arrow, y_wc-0.1*l_arrow, x_wc+0.1*l_arrow,y_wc+0.1*l_arrow, LBLUE win_move x_wc, y_wc win_line x_wc+l_arrow*cos(phi_wc), y_wc+l_arrow*sin(phi_wc), BLUE //----------sonar plot--------------- gosub sonar_plot /------------------------------ /*SH2!2*/// calculate a new motor command - using neural network /------------------------------ / (simplified here) // left_speed = 15 // right_speed = 15 / gosub feedback_straight_line gosub predict_position_of_control_action / gosub update_network / for the circle gosub update_network2 gosub calculate_new_motor_command /*HS!!2*/// deal with obstacles (stop or avoid) or execute the motor command temp_left_speed = left_speed temp_right_speed = right_speed gosub sonar_safety // disabled for trial on bricks /*HH232*/// -> avoidance manoeuvres (not if ON BRICKS) if ON_BRICKS = 1 goto no_avoidance endif if alarm_counter <= 2 // >= 2 int motion_duration = 4500 // 3200 // 2800 // 2400 for short avoidance moves /*SS!!3*/ // 1. case of obstacle in front -> turn in the previous direction if front_obstacle =1 & left_obstacle = 0 & right_obstacle=0 if delta_phi < 0 left_speed = 18 //10 right_speed = 1 else left_speed = 1 right_speed = 18 //10 endif gosub send_motor_command ms_delay motion_duration print "STOP AFTER ESCAPE MANOEUVRE" left_speed = 0 right_speed = 0 gosub send_motor_command endif /*HS!!3*/ // 2. left or right obstacle -> turn to escape // new 23.2.03 if left_obstacle = 1 & right_obstacle = 0 left_speed = 18 //10 right_speed = 1 gosub send_motor_command ms_delay motion_duration //1500 print "STOP AFTER ESCAPE MANOEUVRE" left_speed = 0 right_speed = 0 gosub send_motor_command endif if right_obstacle = 1 & left_obstacle = 0 left_speed = 1 right_speed = 18 //10 gosub send_motor_command ms_delay motion_duration //1500 print "STOP AFTER ESCAPE MANOEUVRE" left_speed = 0 right_speed = 0 gosub send_motor_command endif /*SH3!3*/ // 3. Obstacles on both sides -> do not move if right_obstacle = 1 & left_obstacle = 1 left_speed = 1 right_speed = 1 gosub send_motor_command print "SQUEEZED ON BOTH SIDES" my_sound 3000, 150 // short high-pitched beep ms_delay 1500 endif /*HS!!3*/ // 4. If too close in front -> stop and beep (commented out) / if sonar_range[4]<0 & sonar_range[5]<0 & sonar_range[6]<0 / my_sound 6000,100 / endif /*HH3!3*/ // 4. stop after the escape manoeuvre //print "STOP AFTER ESCAPE MANOEUVRE" - now done inside each if above. //left_speed = 0 //right_speed = 0 //gosub send_motor_command else /*HH2!2*/// or proceed with previous command left_speed = temp_left_speed right_speed = temp_right_speed // gosub send_motor_command //gb 23.10.08 endif /*HH2!2*/no_avoidance: gosub send_motor_command //gb 23.10.08 old_x_wc = x_wc old_y_wc = y_wc old_phi_wc = phi_wc // used also in predict and sonar plot... /pak /*SH2!2*/endwhile //pak //int bla=getch() gosub stop_motors /---------------------------------------------- return /*SH1!1*/ /*HS!!1*/predict_current_shaft_position: //delays adjustable if SIMULATION=1 return endif float delay1 = 1.20 float time_delay_shaft = elapsed_time(1)-last_time_shaft // 0.94= times in seconds to send back a value in phase with RugW. // previous 0.6, 0.5 was ok, 0.42, 0.695 //print "---------- ", time_delay_shaft //NOTE: I assume that delay1 + delay2 (next subroutine) = total time delay // about 2.5 sec at Wellcome float local_x, local_y, local_phi d_x_shaft_dt = delay1*(x_shaft - old_x_shaft)/time_delay_shaft d_y_shaft_dt = delay1*(y_shaft - old_y_shaft)/time_delay_shaft angle1 = old_phi_shaft angle2 = phi_shaft gosub angle_diff d_phi_shaft_dt = delay1*(angle_difference)/time_delay_shaft /d_phi_shaft_dt = delay1*(phi_shaft - old_phi_shaft)/time_delay_shaft float delta_s = sqrt(d_x_shaft_dt * d_x_shaft_dt + d_y_shaft_dt * d_y_shaft_dt) local_x = x_shaft + delta_s*cos(phi_shaft+0.5*d_phi_shaft_dt) local_y = y_shaft + delta_s*sin(phi_shaft+0.5*d_phi_shaft_dt) local_phi = phi_shaft + d_phi_shaft_dt old_x_shaft=x_shaft old_y_shaft=y_shaft old_phi_shaft=phi_shaft x_shaft = local_x y_shaft = local_y phi_shaft = local_phi /win_move local_x, local_y last_time_shaft = elapsed_time(1) return /*HH1!1*/predict_position_of_control_action: //delays adjustable if SIMULATION!=1 float delay2 = 1.3// 1.75 float time_delay_motor = elapsed_time(1)-last_time_motor // previous 1.5 //print "----------------", time_delay_motor float local_x, local_y, local_phi d_x_wc_dt = delay2*(x_wc - old_x_wc)/time_delay_motor d_y_wc_dt = delay2*(y_wc - old_y_wc)/time_delay_motor d_phi_wc_dt = delay2*(phi_wc - old_phi_wc)/time_delay_motor /old_x_wc=x_wc /old_y_wc=y_wc /old_phi_wc=phi_wc float delta_s = sqrt(d_x_wc_dt * d_x_wc_dt + d_y_wc_dt * d_y_wc_dt) local_x = x_wc + delta_s*cos(phi_wc+0.5*d_phi_wc_dt) local_y = y_wc + delta_s*sin(phi_wc+0.5*d_phi_wc_dt) local_phi = phi_wc + d_phi_wc_dt x_wc_predict = local_x y_wc_predict = local_y phi_wc_predict = local_phi /win_move local_x, local_y /printf "Prediction %f, %f, %f\n", x_wc_predict, y_wc_predict, phi_wc_predict*180/PI last_time_motor = elapsed_time(1) else // in simulation mode x_wc_predict = x_wc y_wc_predict = y_wc phi_wc_predict = phi_wc endif return /*HH121*/sonar_safety: if ON_BRICKS = 1 return endif // This routine stops the wheelchair until the obstacle has moved. // if after 1200 ms the obstacle is still there, the control is // returned to the main loop which will execute an escape movement. int shaft_encoder_hold = 0 int alarm_counter=0 /*HS!!2*/detect_an_obstacle: front_obstacle=0 left_obstacle=0 right_obstacle=0 //for sonar = 4 to 6 // gosub fast_get_sonar_range // acquire fresh data in front // if sonar_range[sonar]<150 & sonar_range[sonar] > 0 // front_obstacle = 1 //print "FRONT = ", sonar, " range = ", sonar_range[sonar] //pak /goto sonar_stop // endif //next sonar // idea, not do all front sonars one after the other, to avoid stray echos? sonar =4 gosub fast_get_sonar_range // acquire fresh data in front if sonar_range[sonar]<150 & sonar_range[sonar] > 0 front_obstacle = 1 endif sonar = 2 gosub fast_get_sonar_range sonar = 3 gosub fast_get_sonar_range sonar =5 gosub fast_get_sonar_range // acquire fresh data in front if sonar_range[sonar]<150 & sonar_range[sonar] > 0 front_obstacle = 1 endif sonar = 7 gosub fast_get_sonar_range sonar = 8 gosub fast_get_sonar_range sonar =6 gosub fast_get_sonar_range // acquire fresh data in front if sonar_range[sonar]<150 & sonar_range[sonar] > 0 front_obstacle = 1 endif if sonar_range[2]<80 & sonar_range[2] > 0 left_obstacle=1 //print " sonar 2: ", sonar_range[2], " sonar 3: ", sonar_range[3] /goto sonar_stop endif if sonar_range[8]<80 & sonar_range[8] > 0 right_obstacle=1 /goto sonar_stop endif if sonar_range[3]<60 & sonar_range[3] > 0 left_obstacle=1 /goto sonar_stop endif if sonar_range[7]<60 & sonar_range[7] > 0 right_obstacle=1 /goto sonar_stop endif if front_obstacle = 1 | left_obstacle=1 | right_obstacle=1 goto sonar_stop endif if shaft_encoder_hold = 1 gosub reset_shaft_position //gosub reset_gyro endif //print "NO OBSTACLES : SAFE" return /-------------------------------- /*HH2!2*/sonar_stop: alarm_counter +=1 left_speed = 0 right_speed = 0 gosub send_motor_command //my_sound 9000,100 print "SONAR STOP ", "obstacles L F R=", left_obstacle, " ", front_obstacle, " ", right_obstacle ms_delay 1200 if shaft_encoder_hold = 0 old_x_wc = x_wc old_y_wc = y_wc old_phi_wc = phi_wc shaft_encoder_hold = 1 endif if alarm_counter >= 2 if shaft_encoder_hold = 1 gosub reset_shaft_position gosub reset_gyro endif time_since_last_alarm = elapsed_time(1)-time_of_last_alarm if time_since_last_alarm < 20 alarm_persistence +=1 else alarm_persistence =0 endif time_of_last_alarm = elapsed_time(1) return endif goto detect_an_obstacle return /*HH121*/check_sonar_validity: float tested_phi = phi_shaft - 0.45*d_phi_shaft_dt / a that point in the program, we still use the previous value of phi_wc. / therefore, the tested value float angle_tolerance = 12*PI/180 // this tolerance should be dependent on the angular velocity. // when it is fast, there are less measurement points and // the tolerance should increase. float xy_tolerance = 40 w_x_sonar = 0 w_y_sonar = 0 w_phi_sonar = 0 x_sonar = 0 y_sonar = 0 phi_sonar = 0 found_flag =0 angle1=0 angle2=tested_phi gosub angle_diff /*SS!!2*/if abs(angle_difference) < angle_tolerance // case phi=0; look at the curtain: sonar_d2 if abs(sonar_d2 - max_room_ycm + y_wc) < xy_tolerance & sonar_range[3]>0 y_sonar += max_room_ycm - sonar_d2 phi_sonar = 0 w_y_sonar +=0.25 w_phi_sonar += 0.25 found_flag +=0.25 /my_sound 2000,100 endif if abs(sonar_d1 - x_wc) < xy_tolerance & sonar_range[1]>0 x_sonar += sonar_d1 phi_sonar = 0 w_x_sonar +=0.25 w_phi_sonar += 0.25 found_flag +=0.25 /my_sound 2000,100 endif if abs(sonar_d3 - max_room_xcm + x_wc) < xy_tolerance & sonar_range[5]>0 x_sonar += max_room_xcm - sonar_d3 phi_sonar = 0 w_x_sonar +=0.25 w_phi_sonar += 0.25 found_flag +=0.25 /my_sound 2000,100 endif endif /*HS!!2*/if abs(angle_difference-0.5*PI) < angle_tolerance // case phi=PI/2; look at the nearest side wall or both d2 left, d4 right if abs(sonar_d4 - max_room_xcm + x_wc) < xy_tolerance & sonar_range[7]>0 x_sonar += max_room_xcm - sonar_d4 phi_sonar = 0.5*PI w_x_sonar += 0.25 w_phi_sonar += 0.25 found_flag +=0.25 /my_sound 3000,100 endif if abs(sonar_d2 - x_wc) < xy_tolerance & sonar_range[3]>0 x_sonar += sonar_d2 phi_sonar = 0.5*PI w_x_sonar += 0.25 w_phi_sonar += 0.25 found_flag +=0.25 /my_sound 3000,100 endif if abs(sonar_d1 - y_wc) < xy_tolerance & sonar_range[1]>0 y_sonar += sonar_d1 phi_sonar = 0.5*PI w_y_sonar += 0.25 w_phi_sonar += 0.25 found_flag +=0.25 /my_sound 3000,100 endif if abs(sonar_d3 - max_room_ycm + y_wc) < xy_tolerance & sonar_range[5]>0 y_sonar += (max_room_ycm - sonar_d3) phi_sonar = 0.5*PI w_y_sonar += 0.25 w_phi_sonar += 0.25 found_flag +=0.25 /my_sound 3000,100 endif endif /*HH2!2*/if abs(abs(angle_difference)-PI) < angle_tolerance // case phi=PI; look at the curtain d4 if abs(sonar_d4 - max_room_ycm + y_wc) < xy_tolerance & sonar_range[7]>0 y_sonar += max_room_ycm - sonar_d4 phi_sonar = PI w_y_sonar += 0.25 w_phi_sonar += 0.25 found_flag +=0.25 /my_sound 5000,100 endif if abs(sonar_d2 - y_wc) < xy_tolerance & sonar_range[3]>0 y_sonar += sonar_d2 phi_sonar = PI w_y_sonar += 0.25 w_phi_sonar += 0.25 found_flag +=0.25 /my_sound 5000,100 endif if abs(sonar_d3 - x_wc) < xy_tolerance & sonar_range[5]>0 x_sonar += sonar_d3 phi_sonar = PI w_x_sonar += 0.25 w_phi_sonar += 0.25 found_flag +=0.25 /my_sound 5000,100 endif if abs(sonar_d1 - max_room_xcm + x_wc) < xy_tolerance & sonar_range[1]>0 x_sonar += max_room_xcm - sonar_d1 phi_sonar = PI w_x_sonar += 0.25 w_phi_sonar += 0.25 found_flag +=0.25 /my_sound 5000,100 endif endif /*HH2!2*/if abs(angle_difference+0.5*PI) < angle_tolerance // case phi = -PI/2; look at side walls d4 (small x) and d2 large x if abs(sonar_d4 - x_wc) < xy_tolerance & sonar_range[7]>0 x_sonar += sonar_d4 phi_sonar = -0.5*PI w_x_sonar += 0.25 w_phi_sonar += 0.25 found_flag +=0.25 /my_sound 4000,100 /print " Phi_wc= ", phi_wc, " Phi_sonar = ", phi_sonar /pak endif if abs(sonar_d2 - max_room_xcm + x_wc) < xy_tolerance & sonar_range[3]>0 x_sonar += max_room_xcm - sonar_d2 phi_sonar = -0.5*PI w_x_sonar += 0.25 w_phi_sonar += 0.25 found_flag +=0.25 /my_sound 4000,100 endif if abs(sonar_d1 - max_room_ycm + y_wc) < xy_tolerance & sonar_range[1]>0 y_sonar += max_room_ycm - sonar_d1 phi_sonar = -0.5*PI w_y_sonar += 0.25 w_phi_sonar += 0.25 found_flag +=0.25 /my_sound 4000,100 endif if abs(sonar_d3 - y_wc) < xy_tolerance & sonar_range[5]>0 y_sonar += sonar_d3 phi_sonar = -0.5*PI w_y_sonar += 0.25 w_phi_sonar += 0.25 found_flag +=0.25 /my_sound 4000,100 endif endif /*HH2!2*/// average values if w_x_sonar > 0 x_sonar = 0.25*x_sonar/w_x_sonar endif if w_y_sonar > 0 y_sonar = 0.25*y_sonar/w_y_sonar endif w_x_sonar = 0.8*w_x_sonar w_y_sonar = 0.8*w_y_sonar w_phi_sonar = 0.8*w_phi_sonar /print "ywc = ", y_wc, " ysonar= ",y_sonar return /*HH121*/relocalise: print "RELOCALISE" alarm_persistence=0 /*HS!!2*/if sonar_d2 < 120 & sonar_range[3]>0 // left turn desired angle2 = phi_wc angle1= 0 gosub angle_diff if abs(angle_difference) < PI/5 y_shaft = max_room_ycm - 100 y_sonar = y_shaft w_y_sonar = 1 w_y_shaft = 1 return endif if abs(angle_difference)-0.5*PI < PI/5 x_shaft = 100 x_sonar = x_shaft w_x_sonar = 1 w_x_shaft = 1 return endif if abs(angle_difference)+0.5*PI < PI/5 x_shaft = max_room_xcm - 100 x_sonar = x_shaft w_x_sonar = 1 w_x_shaft = 1 return endif if abs(angle_difference)-PI < PI/5 y_shaft = 100 y_sonar = y_shaft w_y_sonar = 1 w_y_shaft = 1 return endif return endif /*HH2!2*/if sonar_d4 < 120 & sonar_range[7]>0 // right turn desired angle2 = phi_wc angle1= 0 gosub angle_diff if abs(angle_difference)-PI < PI/5 y_shaft = max_room_ycm - 100 y_sonar = y_shaft w_y_sonar = 1 w_y_shaft = 1 return endif if abs(angle_difference)-0.5*PI < PI/5 x_shaft = max_room_xcm - 100 x_sonar = x_shaft w_x_sonar = 1 w_x_shaft = 1 return endif if abs(angle_difference)+0.5*PI < PI/5 x_shaft = 100 x_sonar = x_shaft w_x_sonar = 1 w_x_shaft = 1 return endif if abs(angle_difference) < PI/5 y_shaft = 100 y_sonar = y_shaft w_y_sonar = 1 w_y_shaft = 1 return endif return endif /*HH2!2*/if sonar_d3 < 120 & sonar_range[5]>0 // heading towards a wall angle2 = phi_wc angle1= 0 gosub angle_diff if abs(angle_difference)-0.5*PI < PI/5 y_shaft = max_room_ycm - 100 y_sonar = y_shaft w_y_sonar = 1 w_y_shaft = 1 return endif if abs(angle_difference) < PI/5 x_shaft = max_room_xcm - 100 x_sonar = x_shaft w_x_sonar = 1 w_x_shaft = 1 return endif if abs(angle_difference)-PI < PI/5 x_shaft = 100 x_sonar = x_shaft w_x_sonar = 1 w_x_shaft = 1 return endif if abs(angle_difference)+0.5*PI < PI/5 y_shaft = 100 y_sonar = y_shaft w_y_sonar = 1 w_y_shaft = 1 return endif return endif return /*SH1!1*/ /*SS!!1*/calculate_new_motor_command: float next_x = node_output(first_node(Next_Position)) float next_y = node_output(first_node(Next_Position)+1) float next_phi = node_output(first_node(Next_Position)+2) win_fillellipse next_x-0.1*l_arrow, next_y-0.1*l_arrow, next_x+0.1*l_arrow, next_y+0.1*l_arrow, RED win_move next_x, next_y win_line next_x+l_arrow*cos(next_phi), next_y+l_arrow*sin(next_phi), YELLOW /*HS!!2*/// next point as target. phi2 = angle to target float dx = next_x - x_wc float dy = next_y - y_wc float dist = sqrt(dx*dx+dy*dy) phi2 = 999 if dx=0 & dy >0 phi2 = PI/2 endif if dx=0 & dy <0 phi2 = -PI/2 endif phi2 = arctan(dy/dx) if dy<0 & dx<0 phi2 = phi2 + PI endif if dy>=0 & dx<0 phi2 = phi2 + PI endif if dy<0 & dx>0 phi2 =phi2 + 2*PI // to avoid all negative angles endif // phi2 is where the robot should point to reach the target /*HH2!2*/// ---- difference between current robot heading phi_wc and desired one phi2 / try use the predicted angle when the action starts: / not a good idea, there are big jumps in prediction / when sonar data are recorded // //float phip = phi_wc_predict // instead of phi_wc float sind=(cos(phi2)*sin(phi_wc)-sin(phi2)*cos(phi_wc)) float cosd = (cos(phi2)*cos(phi_wc)+sin(phi2)*sin(phi_wc)) float local_tan = sind/cosd float delta_phi = arctan(local_tan) if sind >=0 & cosd <0 delta_phi += PI endif if sind < 0 & cosd < 0 delta_phi -= PI endif delta_phi =-delta_phi /*SH2!2*//----speed control ------- new - Wellcome trust base_speed = section_speed[current_section] float dist0=1 //m float w1 = 1/(1+exp(-(0.01*dist-dist0))) //dist in m, for control by angle to target float w2 = 1/(1+exp(+(0.01*dist-dist0))) //dist in m, for control by heading diff (delta_phi) // distance effect //print "w1= ", w1, " w2= ", w2 angle1 = phi_wc angle2 = next_phi gosub angle_diff //float exp2 =exp(-0.5*(angle_difference)*(angle_difference)) // direction effect float speed = 0.5*base_speed*(1+exp(-abs(delta_phi))) // all about adjusting the speed to angle differences if phi2 = 999 speed = 0 endif //print "base_speed= ", base_speed, " speed = ", speed //float exp3 =exp(-0.5*delta_phi*delta_phi) float sp_gain = 1.1 //1 alllowed too much excursion // 0.82+0.9*(exp3) float vl1 = 2*speed/(1+exp( + sp_gain*delta_phi) ) float vr1 = 2*speed/(1+exp( - sp_gain*delta_phi) ) float vl2 = 2*speed/(1+exp( + sp_gain*angle_difference) ) float vr2 = 2*speed/(1+exp( - sp_gain*angle_difference) ) print "vl1= ", vl1, " vr1= ",vr1 print "vl2= ", vl2, " vr2= ",vr2 left_speed_desired = fmax(1, w1*vl1 + w2*vl2) right_speed_desired = fmax(1, w1*vr1 + w2*vr2) /float sp_gain = 0.5+0.3*speed/15 /float sp_mom = 0.2 /left_speed_desired = sp_mom*left_speed_desired + (1-sp_mom)*speed/(1+exp( + sp_gain*(delta_phi)) ) /right_speed_desired = sp_mom*right_speed_desired + (1-sp_mom)*speed/(1+exp( - sp_gain*(delta_phi)) ) /float lambda = 0.4 //old good values //---------- ///float speed = 0.7*base_speed + 0.3*base_speed*(exp1*exp2*exp3) ///float sp_gain = 0.82+0.9*(exp3) float sp_mom = 0.2 // 0.22+(0.8/speed) left_speed_desired = (1-sp_mom)*left_speed_desired + sp_mom*float(left_speed) right_speed_desired = (1-sp_mom)*right_speed_desired + sp_mom*float(right_speed) //float lambda = 0.54*sp_gain // seemed promissing during the night //float lambda = 0.5 //gbtest 090712 //----------- left_speed = int(left_speed_desired) right_speed = int(right_speed_desired) print "Ldes = ", left_speed_desired , " Rdes. = ", right_speed_desired, " phi_wc = ", 180*phi_wc/PI ///left_speed = int(left_speed_desired + lambda*(left_speed_desired -float(left_speed))) ///right_speed = int(right_speed_desired + lambda*(right_speed_desired -float(right_speed))) /*SS!!2*/return /*HS!!1*/send_motor_command: //motor bias in here. //int direction_byte = 0 //if right_speed_desired >= 0 // direction_byte +=1 //endif //if left_speed_desired >= 0 // direction_byte +=2 //endif // TO include when backwards motion is // considered in the RugWar board message_byte = 107 gosub handshake_send_byte // speeds must not exceed +-100 message_byte = int(0.80*float(left_speed)) + 128 //0.8 foro Wellcome, was 0.85 //message_byte = int(1.1*float(left_speed)) + 128 // the coef 1.1 compensates for an asymetry between left and right // in the Penny and Gilles system. // seems to be thr other way now (Nov 2009) right wheel is slugish. gosub handshake_send_byte //message_byte = right_speed + 128 message_byte = int(1.15*float(right_speed)) + 128 gosub handshake_send_byte //message_byte = direction_byte //gosub handshake_send_byte // TO include when backwards motion is // considered in the RugWar board print "sent L=",left_speed, " R=", right_speed return /*HH1!1*/stop_motors: message_byte = 99 gosub handshake_send_byte return /*SH1!1*/ /*HS!!1*/get_gyro_data: message_byte = 105 gosub handshake_send_byte gosub get_float_data phi_gyro = 1.26*PI*float_data/180 / print "phi_gyro = ", 180*phi_gyro/PI return /*HH1!1*/reset_gyro: / gb 23.02.03 : gyro not used. / message_byte = 125 / gosub handshake_send_byte / / float_data = 180*phi_wc/PI / gosub send_float_data return /*HH1!1*/get_battery_data: int b3,b2,b1 message_byte = 106 gosub handshake_send_byte gosub get_float_data return /*HH1!1*/get_shaft_position_data: int b3,b2,b1 message_byte = 100 gosub handshake_send_byte // debug //gosub get_float_data //float rr = float_data //gosub get_float_data //float ll = float_data // end debug gosub get_float_data x_shaft = float_data /pak gosub get_float_data y_shaft = float_data /pak gosub get_float_data phi_shaft = PI*float_data/180 /print "x_shaft= ", x_shaft, ", y_shaft= ", y_shaft, ", phi_shaft= ", 180*phi_shaft/PI return /*HH1!1*/reset_shaft_position: message_byte = 120 gosub handshake_send_byte float_data = x_wc gosub send_float_data float_data = y_wc gosub send_float_data float_data = 180*phi_wc/PI gosub send_float_data return /*HH1!1*/reset_shaft_position_to_zero: x_wc = 0 y_wc = 0 gosub reset_shaft_position return /*SH1!1*/ /*HS!!1*/float_to_three_bytes: b3=0 int Rest, Counter_base = 128 while float_data > 32000.0 float_data -= 32000.0 b3 += 1 endwhile while float_data < -32000.0 float_data += 32000.0 b3 += 1 endwhile Rest = int(float_data) if float_data < 0.0 Rest = -int(float_data) b3 = b3 + Counter_base endif b1 = land(Rest,255) b2 = Rest/256 // print " ---- b3= ", b3, " b2= ",b2, " b1= ", b1 return /*HH1!1*/get_float_data: gosub handshake_read_byte b3=in_byte gosub handshake_read_byte b2=in_byte gosub handshake_read_byte b1=in_byte if b3 < 128 float_data = 32000 * float(b3) + 256 * float(b2) + float(b1) endif if b3 >= 128 float_data = - 32000 * float(b3-128) - 256 * float(b2) - float(b1) endif //print " ---- b3= ", b3, " b2= ",b2, " b1= ", b1, " --> Float_data = ", float_data return /*HH1!1*/send_float_data: gosub float_to_three_bytes message_byte = b3 gosub handshake_send_byte message_byte = b2 gosub handshake_send_byte message_byte = b1 gosub handshake_send_byte return /*HH1!1*/handshake_send_byte: int in_byte, serial_count=0 / print " " in_byte = serial_byte_in(port) // just to empty the buffer of a possible ok_byte waiting send_byte_loop: serial_count +=1 serial_byte_out port, message_byte in_byte = serial_byte_in(port) / printf " %d,", in_byte if (in_byte != ok_byte) & (serial_count < serial_count_limit) goto send_byte_loop endif if serial_count >= serial_count_limit print " " print "No response from RugWarrior while sending." print "Please press ESC, and reset the RugWarrior board." beep pak endif return /*HH1!1*/handshake_read_byte: int in_byte, in_byte1,serial_count=0 / print " " read_loop: serial_count += 1 in_byte = serial_byte_in(port) in_byte1 = serial_byte_in(port) / printf " %d-%d,", in_byte, in_byte1 if ((in_byte = 300) & (serial_count < serial_count_limit)) | (in_byte1 != in_byte ) goto read_loop endif / printf " ->%d,", in_byte if serial_count >= serial_count_limit print " " print "No response from RugWarrior while reading." print "Please reset it and check cables or power supply." beep pak endif serial_byte_out port, ok_byte return /*SH1!1*/ /*HS!!1*/build: //dg 20,15,STANDARD_NODE_TYPE dg 40,30,STANDARD_NODE_TYPE //dg 54,40,STANDARD_NODE_TYPE mg contrast grid_nodestyle contrast, GREYSC_DISP_STYLE drawgrid contrast mg Hough grid_nodestyle Hough, GREYSC_DISP_STYLE drawgrid Hough dg 8,3, STANDARD_NODE_TYPE mg Average grid_nodestyle Average, GREYSC_DISP_STYLE drawgrid Average return /*HH121*/build_trajectories: // new incl circle diameter + number of elements float x1,y1,phi1, x1next, y1next, phi1next float theta, theta_next, r int nodes_id /*HS!!2*/// neural net sizes definition / two circles section_size[1]=12 section_size[2]=12 section_size[3]=12 section_size[4]=12 /inward spiral section_size[5]=12 section_size[6]=10 section_size[7]=8 section_size[8]=5 section_size[9]=5 / four eights /section_size[10]=6 /section_size[11]=6 /section_size[12]=6 /section_size[9]=6 section_size[10]=6 section_size[11]=6 section_size[12]=6 section_size[13]=6 section_size[14]=6 section_size[15]=6 section_size[16]=6 section_size[17]=6 section_size[18]=6 section_size[19]=6 section_size[20]=6 section_size[21]=6 / outward spiral /section_size[26]=3 /section_size[27]=4 section_size[22]=6 section_size[23]=8 section_size[24]=10 section_size[25]=12 int net_size = 0 //for i = 1 to 31 //for i = 1 to 4 //31 : 1 -> 4 = only encode the two outer circles. Amsterdam / net_size += section_size[i] //next i // WELLCOME TRAJECTORY for i=1 to 31 // Wellcome if section_list[i]!=-99 net_size+=section_size[section_list[i]] endif next i /*HH2!2*// nn build dg 1,2, INPUT_NODE_TYPE mg Position grid_nodestyle Position, GREYSC_DISP_STYLE drawgrid Position dg 12, int(float(net_size)/12)+1, GRBF_NODE_TYPE mg Trajectory grid_nodestyle Trajectory, GREYSC_DISP_STYLE drawgrid Trajectory dg 1, 1, LINEAR_NODE_TYPE mg Sequence_State grid_nodestyle Sequence_State, GREYSC_DISP_STYLE drawgrid Sequence_State /dg 1, 1, LINEAR_NODE_TYPE mg Special2 grid_nodestyle Special2, GREYSC_DISP_STYLE drawgrid Special2 dg 1,4, LINEAR_NODE_TYPE mg Next_Position grid_nodestyle Next_Position, GREYSC_DISP_STYLE drawgrid Next_Position connecttype ALL_TO_ALL connect Position, Trajectory connect Trajectory, Next_Position connect Trajectory, Sequence_State set_weights 0 set_grid_inweights Trajectory, 999999 int section = 1 int last_node = first_node(Trajectory)-1 for nodes_id = last_node+1 to last_node+section_size[1] congridnode Sequence_State, nodes_id / set_weightsbetnodes first_node(Sequence_State), nodes_id, section_boost*(float(section)-0.5) next nodes_id last_node = last_node+section_size[1] section=2 for nodes_id = last_node+1 to last_node + section_size[2] congridnode Special2, nodes_id /set_weightsbetnodes first_node(Special2), nodes_id, section_boost*(float(section)-0.5) / old section based set_weightsbetnodes first_node(Special2), nodes_id, section_boost*(float(nodes_id - first_node(Trajectory) + 1)-0.5) / new node based next nodes_id last_node= last_node + section_size[2] connect Sequence_State, Special2 set_weightsbetgrids Sequence_State, Special2, 1 for nodes_id = last_node+1 to first_node(Trajectory)+net_size -1 congridnode Sequence_State, nodes_id next nodes_id uw /*SH2!2*/// trajectory dimensions + margins //r=350-margin of error due to low gain /float margin = 100 / setting for gallery float margin = 50 / setting for Amsterdam 09 and Wellcome 2012 /float margin = 30 / setting for drawing float r0 = 300// 200 : a circle with a diam of 6m, for Wellcome Trust float dist_from_back_wall = 150 //not used? float xc= 0.5*max_room_xcm //center of circle //float yc= max_room_ycm - dist_from_back_wall - r - margin float yc=0.5*max_room_ycm+50 //center of circle //float yc=max_room_ycm - xc //iniva //float yc=410 //Amsterdam /*HS!!2*//first 1/2 circle, section 1 last_node = first_node(Trajectory)-1 section = 1 float start_angle = PI float rotation_dir = 1 // 1 = anticlockwise // opposite (clockwise) = -1 r=r0-margin-10 xc=0.5*max_room_xcm /*SH2!2*/gosub encode_half_circle /*HS!!2*//second 1/2 circle, section 2 section = 2 start_angle = 0 // opposite (clockwise) = -1 r=r0-margin-10 xc=0.5*max_room_xcm /*SH2!2*/gosub encode_half_circle /*HS!!2*//third 1/2 circle, section 3 section = 3 start_angle = PI // opposite (clockwise) = -1 r=r0-margin-10 xc=0.5*max_room_xcm /*SH2!2*/gosub encode_half_circle /*HS!!2*//fourth 1/2 circle, section 4 section = 4 start_angle = 0 // opposite (clockwise) = -1 r=r0-margin-10 xc=0.5*max_room_xcm /*SH2!2*/gosub encode_half_circle /*HS!!2*//spiral inward, section 5 section = 5 start_angle = PI // opposite (clockwise) = -1 r=(5/6)*(r0-margin) xc=0.5*max_room_xcm-(0.5/6)*(r0-margin) /*SH2!2*///gosub encode_half_circle /*HS!!2*//spiral inward, section 6 section = 6 start_angle = 0 // opposite (clockwise) = -1 r=(4/6)*(r0-margin) xc=0.5*max_room_xcm+(0.25/6)*(r0-margin) /*SH2!2*///gosub encode_half_circle /*HS!!2*//spiral inward, section 7 section = 7 start_angle = PI // opposite (clockwise) = -1 r=(3/6)*(r0-margin) xc=0.5*max_room_xcm-(0.5/6)*(r0-margin) /*SH2!2*///gosub encode_half_circle /*HS!!2*//spiral inward, section 8 == 8 section = 8 start_angle = 0 // opposite (clockwise) = -1 r=(2.2/6)*(r0-margin) xc=0.5*max_room_xcm /*SH2!2*//gosub encode_half_circle /*HS!!2*//---spiral inward, section 9 section = 9 start_angle = PI // opposite (clockwise) = -1 r=(1/6)*(r0-margin) xc=0.5*max_room_xcm-(0.5/6)*(r0-margin) /*SH2!2*///gosub encode_half_circle /*HS!!2*//--- figure of 8, section 10 section = 10 start_angle = PI rotation_dir = -1 // opposite (clockwise) = -1 r=0.5*(r0-margin) xc=0.5*max_room_xcm+r /*SH2!2*//gosub encode_half_circle /*HS!!2*// ---figure of 8, section 11 section = 11 start_angle = 0 rotation_dir = -1 // opposite (clockwise) = -1 r=0.5*(r0-margin) xc=0.5*max_room_xcm+r /*SH2!2*///gosub encode_half_circle /*HS!!2*// ---figure of 8, section 12 section = 12 start_angle = 0 rotation_dir = 1 // opposite (clockwise) = -1 r=0.5*(r0-margin) xc=0.5*max_room_xcm-r /*SH2!2*///gosub encode_half_circle /*HS!!2*// figure of 8, section 13 section = 13 start_angle = PI rotation_dir = 1 // opposite (clockwise) = -1 r=(1/2)*(r0-margin) xc=0.5*max_room_xcm-r //r=(1/6)*(r0-margin) //xc=0.5*max_room_xcm-r-(0.25/6)*(r0-margin) /*SH2!2*/gosub encode_half_circle /*HS!!2*// figure of 8, section 14 section = 14 start_angle = PI rotation_dir = -1 // opposite (clockwise) = -1 r=0.5*(r0-margin) xc=0.5*max_room_xcm+r /*SH2!2*/gosub encode_half_circle /*HS!!2*// figure of 8, section 15 section = 15 start_angle = 0 rotation_dir = -1 // opposite (clockwise) = -1 r=0.5*(r0-margin) xc=0.5*max_room_xcm+r /*SH2!2*/gosub encode_half_circle /*HS!!2*// figure of 8, section 16 section = 16 start_angle = 0 rotation_dir = 1 // opposite (clockwise) = -1 r=0.5*(r0-margin) xc=0.5*max_room_xcm-r /*SH2!2*/gosub encode_half_circle /*HS!!2*// figure of 8, section 17 section = 17 start_angle = PI rotation_dir = 1 // opposite (clockwise) = -1 r=0.5*(r0-margin) xc=0.5*max_room_xcm-r /*SH2!2*///gosub encode_half_circle /*HS!!2*// figure of 8, section 18 section = 18 start_angle = PI rotation_dir = -1 // opposite (clockwise) = -1 r=0.5*(r0-margin) xc=0.5*max_room_xcm+r /*SH2!2*///gosub encode_half_circle /*HS!!2*// figure of 8, section 19 section = 19 start_angle = 0 rotation_dir = -1 // opposite (clockwise) = -1 r=0.5*(r0-margin) xc=0.5*max_room_xcm+r /*SH2!2*///gosub encode_half_circle /*HS!!2*// figure of 8, section 20 section = 20 start_angle = 0 rotation_dir = 1 // opposite (clockwise) = -1 r=0.5*(r0-margin) xc=0.5*max_room_xcm-r /*SH2!2*///gosub encode_half_circle /*HS!!2*// figure of 8, section 21 section = 21 start_angle = PI rotation_dir = 1 // opposite (clockwise) = -1 r=0.5*(r0-margin) xc=0.5*max_room_xcm-r /*SH2!2*///gosub encode_half_circle /*HS!!2*// figure of 8, section 22 section = 22 start_angle = PI rotation_dir = -1 // opposite (clockwise) = -1 r=0.5*(r0-margin) xc=0.5*max_room_xcm+r /*SH2!2*///gosub encode_half_circle /*HS!!2*// figure of 8, section 23 section = 23 start_angle = 0 rotation_dir = -1 // opposite (clockwise) = -1 r=0.5*(r0-margin) xc=0.5*max_room_xcm+r /*SH2!2*///gosub encode_half_circle /*HS!!2*// figure of 8, section 24 section = 24 start_angle = 0 rotation_dir = 1 // opposite (clockwise) = -1 r=0.5*(r0-margin) xc=0.5*max_room_xcm-r /*SH2!2*///gosub encode_half_circle /*HS!!2*// figure of 8, section 25 section = 25 start_angle = PI // opposite (clockwise) = -1 r=0.5*(r0-margin) xc=0.5*max_room_xcm-r /*SH2!2*///gosub encode_half_circle /*HS!!2*//--spiral outward, section 26 section = 26 start_angle = 0 // opposite (clockwise) = -1 r=0.5*(1/4)*(r0-margin) xc=0.5*max_room_xcm-r /*SH2!2*//gosub encode_half_circle /*HS!!2*//---spiral outward, section 27 section = 27 start_angle = PI // opposite (clockwise) = -1 r=0.5*((1/4)+(1/3))*(r0-margin) xc=0.5*max_room_xcm /*HH2!2*//gosub encode_half_circle /*HH2!2*//spiral outward, section 28 == 22 section = 28 start_angle = 0 // opposite (clockwise) = -1 r=(2/7)*(r0-margin) /r=0.5*((2/4)+(1/3))*(r0-margin) xc=0.5*max_room_xcm-r /*SH2!2*///gosub encode_half_circle /*HS!!2*//spiral outward, section 29 == 23 section = 29 start_angle = PI // opposite (clockwise) = -1 r=0.5*((2/4)+(2/3))*(r0-margin) xc=0.5*max_room_xcm /*SH2!2*///gosub encode_half_circle /*HS!!2*//spiral outward, section 30 == 24 section = 30 start_angle = 0 // opposite (clockwise) = -1 /r=(4/6)*(r0-margin) r=0.5*((3/4)+(2/3))*(r0-margin) xc=0.5*max_room_xcm-(0.5/6)*(r0-margin) /*HH2!2*///gosub encode_half_circle /*HH2!2*//spiral outward, section 31 == 25 section = 31 start_angle = PI // opposite (clockwise) = -1 //new 1/2 circle //r=r0-margin-10 //xc=0.5*max_room_xcm //old 1/2 spiral out r=0.5*((3/4)+(3/3))*(r0-margin) xc=0.5*max_room_xcm+(0.25/6)*(r0-margin) /*SH2!2*///gosub encode_half_circle /*HS!!2*/// set reciprocal weights (trajectory <-> Sequence_State) int section, last_node=first_node(Trajectory)-1 float previous_phase = 0, current_phase = 0 //for section = 1 to 31 //for section = 1 to 4 //31 // only 2 outer circles. Amsterdam for i = 1 to 31 section = section_list[i] if section!=-99 for nodes_id = last_node+1 to last_node + section_size/float node_sigma = GRBF_node_sigma(nodes_id) /previous_phase = wire_weight(wirebetnodes(nodes_id, first_node(Sequence_State))) /current_phase = previous_phase + node_sigma*section_boost*float(nodes_id - first_node(Trajectory) + 1) /set_weightsbetnodes nodes_id, first_node(Sequence_State), current_phase / very new node+sigma based set_weightsbetnodes nodes_id, first_node(Sequence_State), section_boost*float(nodes_id - first_node(Trajectory) + 1) / new node based /set_weightsbetnodes nodes_id, first_node(Sequence_State), section_boost*float(section) / old section based if section != 2 // section 2 done above /current_phase = previous_phase + node_sigma*section_boost*(float(nodes_id - first_node(Trajectory) + 1)-0.5) /set_weightsbetnodes first_node(Sequence_State), nodes_id, current_phase / very new node+sigma based /set_weightsbetnodes first_node(Sequence_State), nodes_id, section_boost*(float(section)-0.5) / old section based set_weightsbetnodes first_node(Sequence_State), nodes_id, section_boost*(float(nodes_id - first_node(Trajectory) + 1)-0.5) / new node based endif next nodes_id last_node = last_node + section_sizeendif //print "section done = ", section, " last_node = ", last_node //pak next i //next section return /*HH1!1*/encode_half_circle: // new: sigma set here /if section > 0 for i = 0 to section_size-1 theta = start_angle+rotation_dir*float(i)*PI/float(section_size) theta_next = start_angle+rotation_dir*float(i+1)*PI/float(section_size) x1=r*cos(theta)+xc y1=r*sin(theta)+yc phi1 = theta+PI/2 x1next=r*cos(theta_next)+xc y1next=r*sin(theta_next)+yc phi1next = theta_next+(PI/2)*(rotation_dir) //gb /print "Theta = ", theta /pak nodes_id = last_node +i+1 set_weightsbetnodes first_node(Position), nodes_id, x1 set_weightsbetnodes first_node(Position)+1, nodes_id, y1 set_weightsbetnodes nodes_id, first_node(Next_Position), x1next set_weightsbetnodes nodes_id, first_node(Next_Position)+1, y1next // set_weightsbetnodes nodes_id, first_node(Next_Position)+2, phi1next set_weightsbetnodes nodes_id, first_node(Next_Position)+2, sin(phi1next) set_weightsbetnodes nodes_id, first_node(Next_Position)+3, cos(phi1next) //print "node= ",nodes_id /print i, " , ", 180*phi1next/PI //pak /set_GRBF_node_sigma nodes_id, max_room_xcm/15 // set_GRBF_node_sigma nodes_id, 25+r/5 //amsterdam set_GRBF_node_sigma nodes_id, 25+r/10 //wellcome / for field drawing / set_GRBF_node_sigma nodes_id, 20+r/5 / for trajectory drawing / set_GRBF_node_sigma nodes_id, r/3 / set_GRBF_node_sigma nodes_id, / float(nodes_id - first_node(Trajectory) + 1) next i last_node = nodes_id //print "section done= ", section, " last_node = ", last_node //pak /endif return /*HH1!1*/build_a_circle: return /*HH121*/update_network2: //new. Deals with closing the loop set_node_output first_node(Position), x_wc_predict set_node_output first_node(Position)+1, y_wc_predict /set_node_output first_node(Position)+2, phi_wc_predict updategrid Trajectory int current_grid = Trajectory gosub normalize_winner / gosub lateral_inhibition gosub update_Sequence_State / commented out for field drawing current_section = int(node_output(first_node(Sequence_State))/section_boost) print "======> Section nb = ", node_output(first_node(Sequence_State))/section_boost, " <=====" updategrid Special2 /*HS!!2*/ // dealing with loop back to first state // three states before the last -> switch to the next section // (explains the 2.5 and 3 below) if node_output(first_node(Sequence_State)) >= (float(net_size)-2.5)*section_boost // from the last state, jump to the 12th. Old version. // avoiding section 1. Unclear why. //set_grid_outputs Special2, 13*section_boost //set_grid_outputs Sequence_State, 13*section_boost //try top jump to the start of section 1. Amsterdam 09 forced_next_state= 3-float(net_size)+(node_output(first_node(Sequence_State))/section_boost) print "forced_next state = ", forced_next_state //print "current state = ", node_output(first_node(Sequence_State))/section_boost //pak set_grid_outputs Special2, forced_next_state*section_boost set_grid_outputs Sequence_State, forced_next_state*section_boost updategrid Trajectory / new node based endif /print "-----Special2 = ", node_output(first_node(Special2)) gosub update_Next_Position / drawgrid Trajectory, Next_Position, Position, Sequence_State, Special2 //ug return /*HH1!1*/update_Next_Position: // new float act_sum = 0 // NOTE: take care when the circle closes , 360 = 0 (but av = 180!) updategrid Next_Position //pak for k = first_node(Trajectory) to last_node(Trajectory) let act_sum = act_sum + node_output(k) //printf " %2.20f,", act_sum next k //print "act_sum = ", act_sum //printf "\n" / done already in update_Sequence_State called earlier if act_sum > 0.0 for k = first_node(Next_Position) to last_node(Next_Position) //print "node= ", k, " node_output= ", node_output(k) set_node_output k, node_output(k)/act_sum next k // use sin and cos to calculate the next angle put into the 3rd node. float sind = node_output(first_node(Next_Position)+2) float cosd = node_output(first_node(Next_Position)+3) /print "sind = ", sind, " cosd= ", cosd float delta_phi = arctan(sind/cosd) if sind >=0 & cosd <0 delta_phi += PI endif if sind < 0 & cosd < 0 delta_phi -= PI endif set_node_output first_node(Next_Position)+2 , delta_phi else print "low activity limit" / pak endif return /*HH1!1*/update_Sequence_State: // new float act_sum = 0 /float act1 = node_output(first_node(Sequence_State)) updategrid Sequence_State float act1 = node_output(first_node(Sequence_State)) for k = first_node(Trajectory) to first_node(Trajectory) + net_size-1 let act_sum = act_sum + node_output(k) next k /pak k = first_node(Sequence_State) / if act_sum > 0.000001 if act_sum > 0.0 set_node_output k, node_output(k)/act_sum /my_sound 100,100 else /pak set_node_output k, act1 endif return /*HH1!1*/angle_diff: float sind=(cos(angle2)*sin(angle1)-sin(angle2)*cos(angle1)) float cosd = (cos(angle2)*cos(angle1)+sin(angle2)*sin(angle1)) float local_tan = sind/cosd float angle_difference = arctan(local_tan) if sind >=0 & cosd <0 angle_difference += PI endif if sind < 0 & cosd < 0 angle_difference -= PI endif angle_difference =-angle_difference return /*SH1!1*/ /*HS!!1*/get_sonar_data: //for self localization -used? //graph_active Sonar //graph_clear keyboard = port_in(96) // NOTE: Somehow this read fools the power saving system // as if a key had been pressed and there is no more slowing // down of the data reading after a few seconds. // port 96 is the keyboard chip 8255A (hex 60). //print keyboard / ms_delay 40 sonar = 3 gosub fast_get_sonar_range / ms_delay 40 sonar = 1 gosub fast_get_sonar_range / ms_delay 40 sonar = 5 gosub fast_get_sonar_range / ms_delay 40 sonar = 7 gosub fast_get_sonar_range / ms_delay 40 /for sonar = 1 to 8 / gosub fast_get_sonar_range /next sonar sonar_d1 = sonar_range[1] - sonar_y[1] sonar_d2 = sonar_range[3]- sonar_x[3] sonar_d3 = sonar_range[5]+ sonar_y[5] sonar_d4= sonar_range[7]+ sonar_x[7] return /*HH1!1*/fast_get_sonar_range: // ibm thinkpad // sonar_range[sonar]=200 // gosub get_sonar_range //gb test //return ms_delay 30 //20 ...10ms for 3m int mask = 2^(sonar-1) int echo_on = 1 int iix, iiy port_out portb, mask /====================== //ms_delay 1 port_out porta, mask for i = 0 to max_sonar_array-1 echo[i]=0 //gb 130811 if echo_on =1 //echo[i]=port_in(portb) for iix=1 to 62 // 50 //to create a delay between port_in calls iiy+=iix // needed by ibm thinkpad next iix //this delay also shifts the palce of the echo in the array. // with 62 ittreaqtio and the factor 1.42, we get the right distance... // with 50 ittreaqtio and the factor 1.17, we get the right distance... echo[i]=port_in(portb) endif if echo[i] = mask & echo_on=1 echo_on=0 echo[i]=port_in(portb) //run once endif if echo_on=0 echo[i]=mask //to simulate the rest of the inputs endif //print echo[i] next i ms_delay 1 port_out porta,0 /===================== int i_dist = -1 for i = min_range_check to max_sonar_array-1 if echo[i] = mask if i_dist = -1 i_dist = i i = max_sonar_array endif endif next i sonar_range[sonar]=float(i_dist)*1.42 // 1.17 //1.19 //print "sonar = ", sonar, " range = ", sonar_range[sonar] return /*HH1!1*/sonar_scan8: while 1 graph_active Sonar graph_clear keyboard = port_in(96) for sonar = 1 to 8 //sonar = 5 gosub get_sonar_range //gosub get_sonar_range_old //ms_delay 400 //50 next sonar endwhile return /*HH1!1*/get_sonar_range: //new test stop reading echo when echo received, gb 27.6.2012 float dt //sonar = 5 //gbtest int mask = 2^(sonar-1) //int mask = 2^(5-1) //gbtest only read from 5 - in front int echo_on = 1 int iix, iiy ms_delay 30 //gb 10ms = 3m port_out portb, mask //reading address //ms_delay 1 /init_timer /====================== //int mask = 2^(sonar-1) //gbtest port_out porta, mask //ping out for i = 0 to max_sonar_array-1 echo[i]=0 //gb 130811 if echo_on =1 //echo[i]=port_in(portb) for iix=1 to 50 //1 //to create a delay between port_in calls iiy+=iix // needed by ibm thinkpad next iix //this delay also shifts the palce of the echo in the array. // with 61 ittreaqtio and the factor 1.386, we get the right distance... // with 62 ittreaqtio and the factor 1.42, we get the right distance... // with 50 ittreaqtio and the factor 1.17, we get the right distance... echo[i]=port_in(portb) endif if echo[i] = mask & echo_on=1 echo_on=0 echo[i]=port_in(portb) //run once more endif if echo_on=0 echo[i]=mask //to simulate the rest of the inputs endif //print echo[i] next i ms_delay 1 port_out porta,0 // reset all inputs? /===================== /dt = elapsed_time(1) /----- int i_dist = 0 /init_timer for i = min_range_check to max_sonar_array-1 color = GREEN / if land(echo[i],mask) = 0 if echo[i]=0 color = RED endif / if land(echo[i],mask) = mask if echo[i] = mask color = YELLOW if i_dist = 0 i_dist = i / i = max_sonar_array endif endif move float(i), float(sonar+1)-0.3 line float(i), float(sonar+1)+0.3, color next i //print "Sonar ", sonar, ", range = ",i_dist, " (dt1=",dt," dt2=",elapsed_time(1),")" print "Sonar ", sonar, ", range [cm] = ",float(i_dist)*1.17 //1.389 if sonar = 8 print " " endif sonar_range[sonar]=float(i_dist)*1.17 // 1.19 return /*HH1!1*/get_sonar_range_old: float dt int mask = 2^(sonar-1) int iix, iiy port_out portb, mask /init_timer /====================== port_out porta, mask for i = 0 to max_sonar_array-1 echo[i]=0 //gb 130811 echo[i]=port_in(portb) for iix=1 to 10 //to create a delay between port_in calls iiy+=iix // needed by ibm thinkpad next iix //print echo[i] next i port_out porta,0 /===================== /dt = elapsed_time(1) /----- int i_dist = 0 /init_timer for i = min_range_check to max_sonar_array-1 color = GREEN / if land(echo[i],mask) = 0 if echo[i]=0 color = RED endif / if land(echo[i],mask) = mask if echo[i] = mask color = YELLOW if i_dist = 0 i_dist = i / i = max_sonar_array endif endif move float(i), float(sonar+1)-0.3 line float(i), float(sonar+1)+0.3, color next i //print "Sonar ", sonar, ", range = ",i_dist, " (dt1=",dt," dt2=",elapsed_time(1),")" print "Sonar ", sonar, ", range [cm] = ",float(i_dist)*1.389 if sonar = 8 print " " endif sonar_range[sonar]=float(i_dist)*1.19 //sonar_range[sonar]=float(i_dist)*1.19 //values for old laptop //endif return /*HH1!1*/sonar_plot: /-------sonar plot------------ // ------------ erase old data------------- // printf "x_wc= %f, y_wc= %f, phi_wc= %f\n", x_wc,y_wc,phi_wc // print "phi_wc = ",phi_wc*180/PI color = 0 // 0 = black for sonar = 1 to 8 xs = old_x_wc + sonar_x[sonar]*cos(old_phi_wc-0.5*PI) - sonar_y[sonar]*sin(old_phi_wc-0.5*PI) ys = old_y_wc + sonar_y[sonar]*cos(old_phi_wc-0.5*PI) + sonar_x[sonar]*sin(old_phi_wc-0.5*PI) win_move xs,ys xs = xs + old_sonar_range[sonar]*cos(old_phi_wc-0.5*PI + sonar_dir[sonar]) ys = ys + old_sonar_range[sonar]*sin(old_phi_wc-0.5*PI + sonar_dir[sonar]) win_line xs,ys, color next sonar //print "erased old sonar" //pak // -------------new data------------- color = 5 // a level of grey for sonar = 1 to 8 xs = x_wc + sonar_x[sonar]*cos(phi_wc-0.5*PI) - sonar_y[sonar]*sin(phi_wc-0.5*PI) ys = y_wc + sonar_y[sonar]*cos(phi_wc-0.5*PI) + sonar_x[sonar]*sin(phi_wc-0.5*PI) win_move xs,ys xs = xs + sonar_range[sonar]*cos(phi_wc -0.5*PI + sonar_dir[sonar]) ys = ys + sonar_range[sonar]*sin(phi_wc -0.5*PI + sonar_dir[sonar]) win_line xs,ys, color old_sonar_range[sonar] = sonar_range[sonar] next sonar /pak return /*SH1!1*/ /*SS!!1*/ /*HS!!1*/find_min_max_act: float max_act = 0 float min_act = 1 int max_node=0, min_node=0 for nodes_id = first_node(current_grid) to last_node(current_grid) if node_output(nodes_id) > max_act max_act = node_output(nodes_id) max_node = nodes_id endif if node_output(nodes_id) < min_act min_act = node_output(nodes_id) min_node = nodes_id endif next nodes_id return /*HH1!1*/normalize_winner: // boost all by factor such that the winner has // an activity 1 and the smallest an activity 0 gosub find_min_max_act // boost for nodes_id = first_node(current_grid) to last_node(current_grid) set_node_output nodes_id, (node_output(nodes_id)-min_act)/(max_act-min_act) next nodes_id return /*HH1!1*/lateral_inhibition: // inhibit all by average activity of active nodes // find average float av_act = 0 float node_number = 0 for nodes_id = first_node(current_grid) to last_node(current_grid) if node_output(nodes_id) > 0.01 av_act = av_act + node_output(nodes_id) node_number = node_number + 1 endif next nodes_id av_act = 0.8*av_act/node_number // to prevent problems when all active nodes have the same output if node_number = 1 av_act = 0 endif // subtract average for nodes_id = first_node(current_grid) to last_node(current_grid) if node_output(nodes_id) > av_act set_node_output nodes_id, node_output(nodes_id) - av_act else set_node_output nodes_id, 0 endif next nodes_id return /*SH1!1*/ /*#CP=29256:XX=99*/
You must be logged in to post a comment.